
Om prosjektet
Prosjektet vårt har som hovedmål å utvikle en avansert løsning for robotstyring ved bruk av VR-teknologi i krevende miljøer, som kjernekraftverk. Ved å kombinere viktige komponenter, som en robotarm som skal følge armbevegelsene til operatøren ved hjelp av en VR-kontroller, et kamera som strømmer bilder, inkludert system for å gi dybdesyn, i sanntid til VR-headsettet for visuell tilbakemelding, samt en spesiallaget gimbal som styres av operatørens hodebevegelser via VR-headsettet, ønsker vi å gi operatøren en realistisk og brukervennlig opplevelse mens de styrer roboten for å utføre oppgavene i slike utfordrende omgivelser.
I sentrum av prosjektet vårt er utviklingen av en spesiallaget gimbal-enhet, som er nøye designet og konstruert for å montere kameraet som skal gi operatøren en realistisk visuell tilbakemelding, samt motorer og annen elektronikk. Gimbal-enheten vil være i stand til å rotere rundt 3 akser (pitch, roll og yaw), basert på operatørens hodebevegelser når de bruker VR-headsettet. Denne funksjonaliteten styres av programvare som kjører på en Raspberry Pi, og kontrollerer de tre motorene for bevegelse.
Videre har vi utviklet programvare som tillater operatøren å styre UR-robotarmen ved hjelp av en VR-kontroller. Dette gir operatøren full kontroll over robotarmens bevegelser basert på deres egne armbevegelser, og gir dem en realistisk og presis opplevelse ved gjennomføring av krevende oppgaver.
Disse komponentene resulterer i et samlet og enhetlig system som består av den spesiallagde gimbal-enheten, robotarmen og programvare. Sluttproduktet vil gi operatørene en realistisk, presis og intuitiv opplevelse mens de styrer roboten i ulike og krevende situasjoner, som i kjernekraftverk. Sikkerhet, effektivitet og nøyaktighet har vært i fokus gjennom hele prosessen, og vårt mål er å forbedre dette i slike miljøer gjennom bruk av avansert VR-teknologi.
Bilder:
-
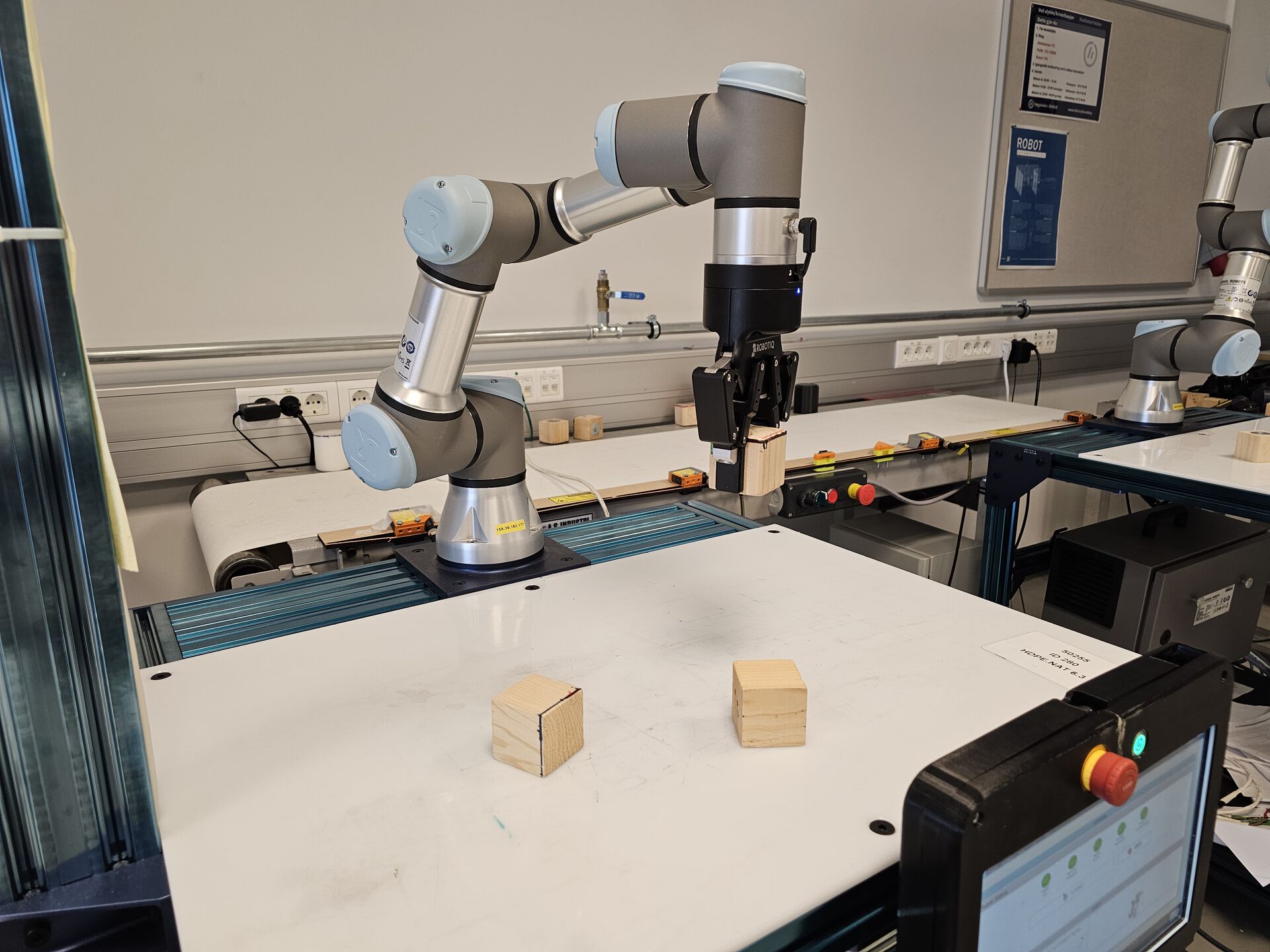
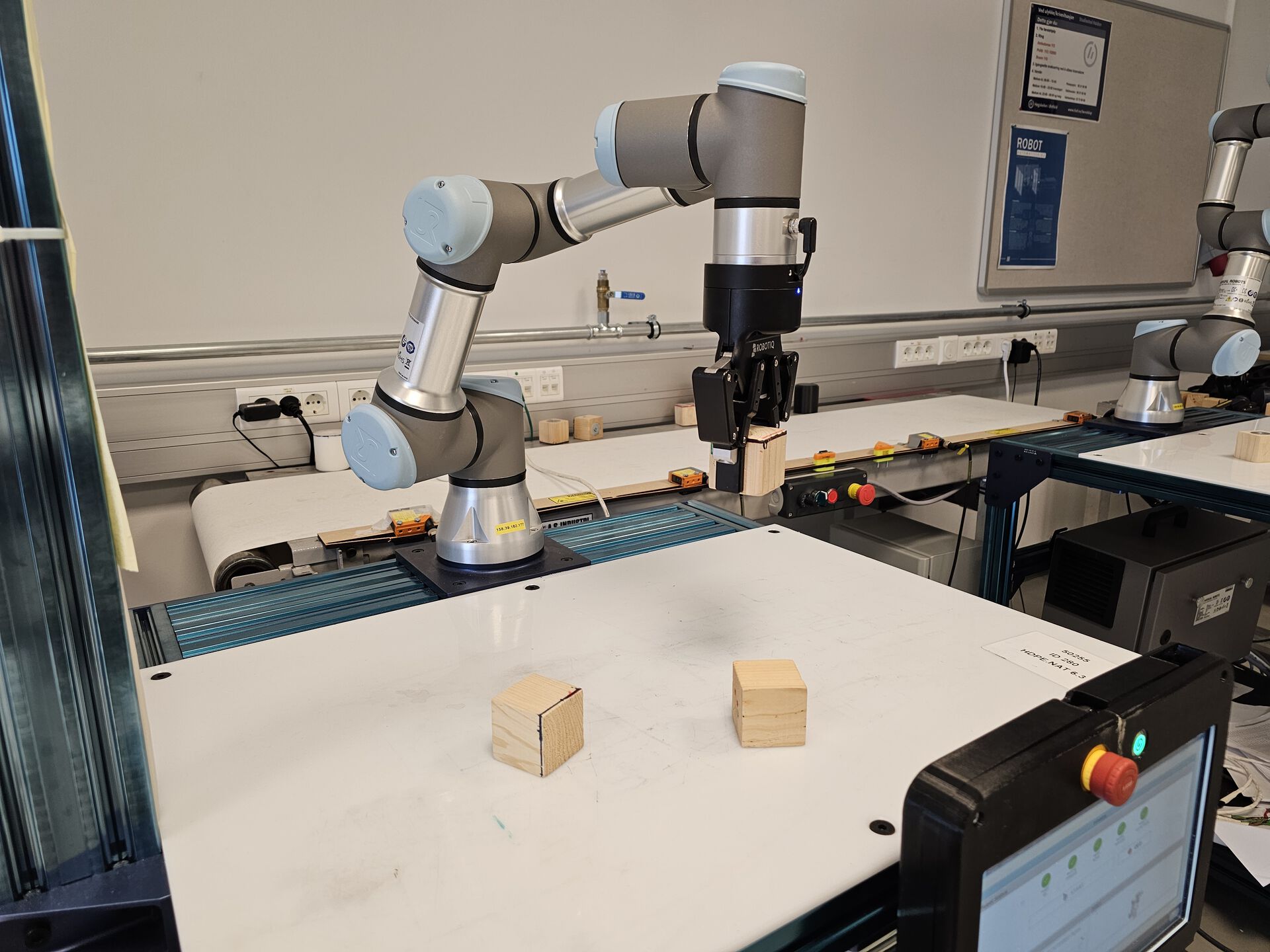
Bilde viser en UR3 robotarm, som vi styrer ved hjelp av VR-kontrolleren.
-
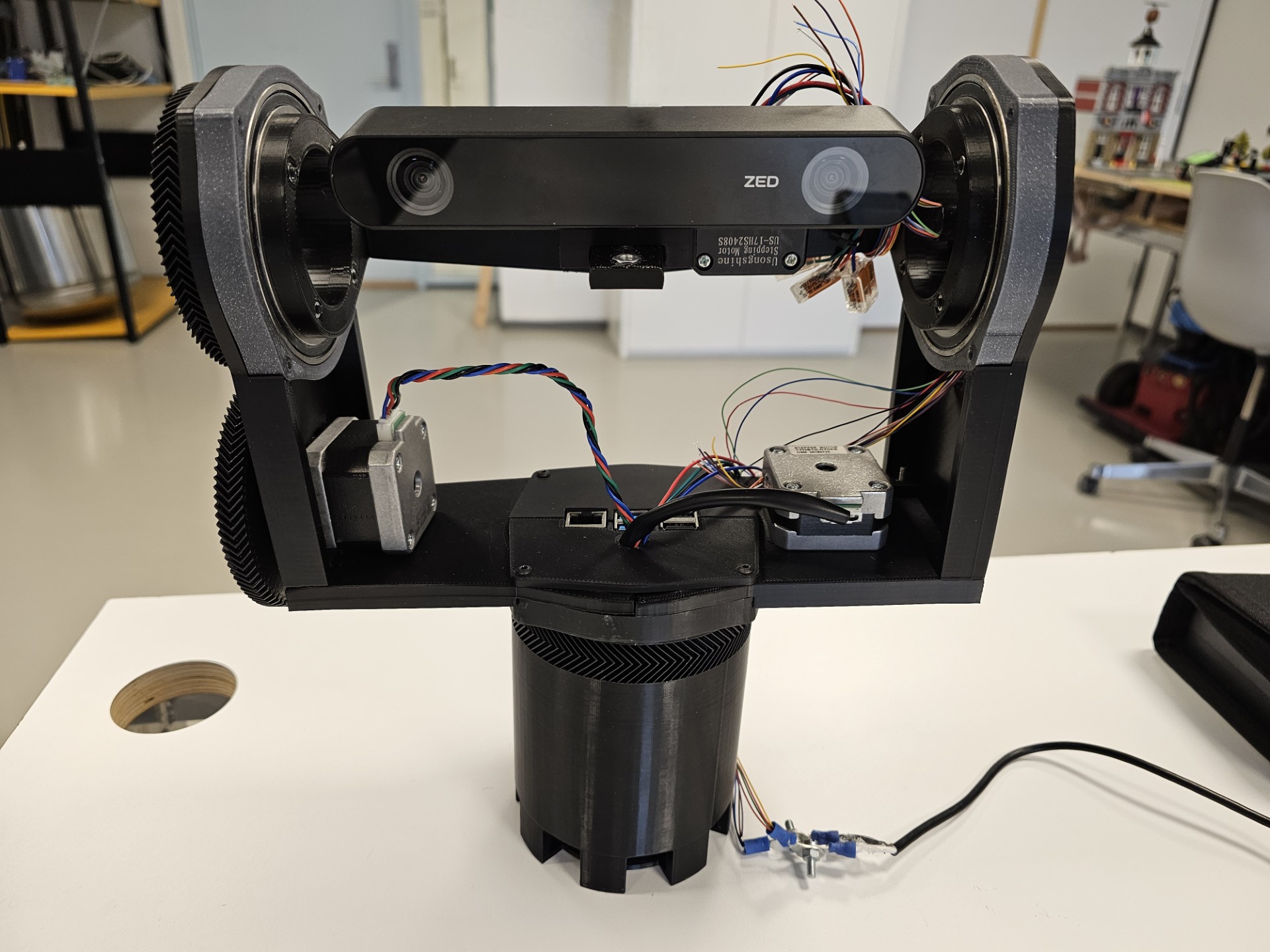
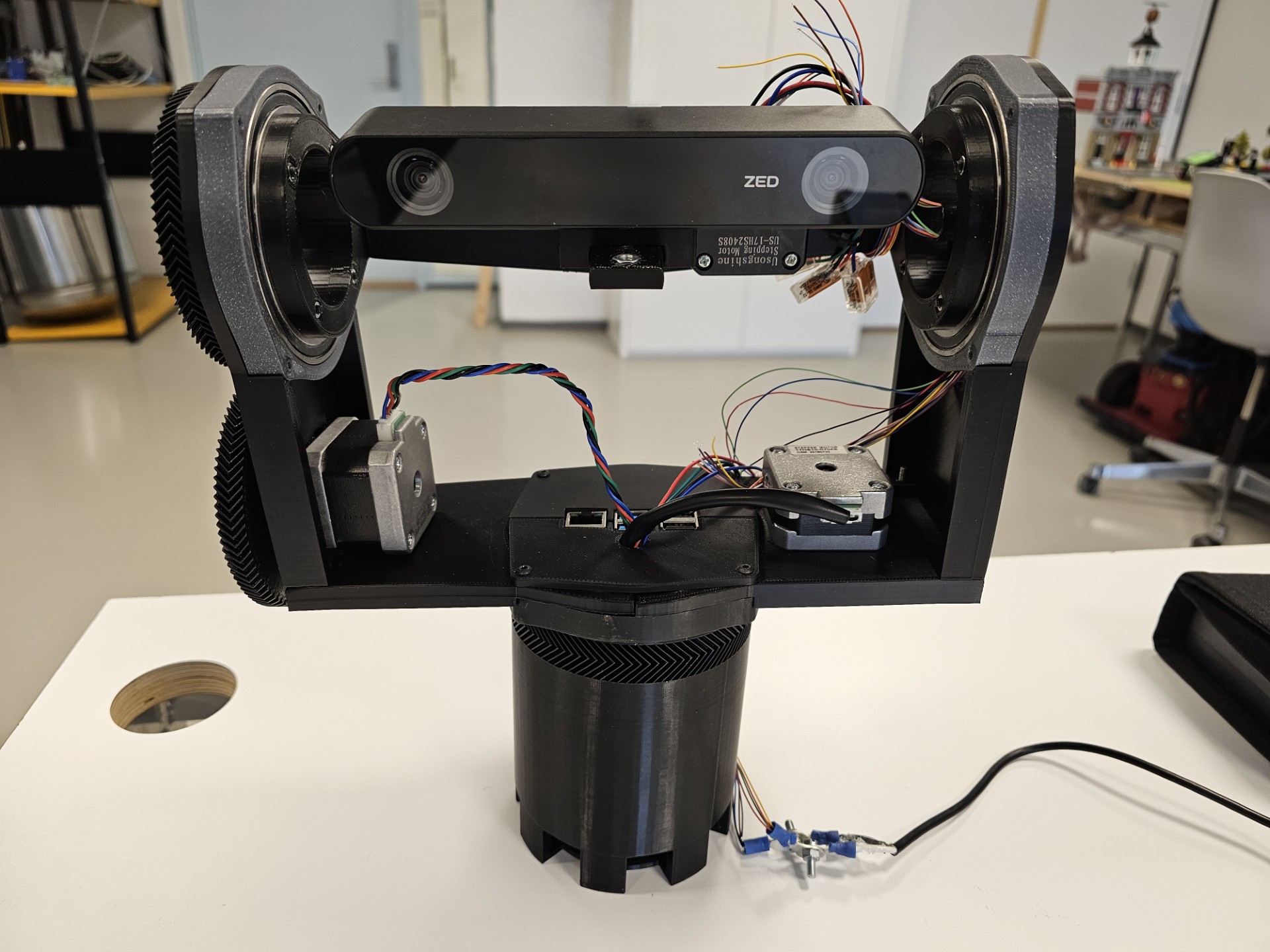
Bilde viser den spesiallagde gimbal-enheten, som styres av hodebevegelsene til operatøren. Et kamera er montert på toppen, som strømmer bildene i sanntid til VR-headsettet.
Prosjektdeltakere
Fredrik Dahl, Emre Andreas Yurt, Tor Øyvind Borge, Torstein Mo Kirkeluten, Didar Shoresh
Om oppdragsgiveren
Vår oppdragsgiver er IFE, Institutt for Energiteknikk. Dette er en bedrift som er mest kjent for sin forskning innen energi, miljø og helse. Bedriften har flere eksperter, veldig ofte med PhD, innen flere forskjellige områder, som kjernekraft, fornybar energi og teknologi innen miljø og medisin.
De har lisens for eierskap og drift av kjernekraftverk i både Halden og Kjeller helt fremt til 31. desember 2028. Etter at de har jobbet mye i dette feltet, har de spesialisert seg på strålevern og miljøovervåking av kjemiske og radioaktive utslipp.
IFE har i dag 720 ansatte, som kommer fra 35 forskjellige land. Det er en stor bedrift, som holder på med over 200 internasjonale prosjekter, samt at de har en årlig omsetning på 1,3 milliarder norske kroner.
Veileder
Haris Jasarevic, Høgskolen i Østfold