
Om prosjektet
I samarbeid med iDROP skal det undersøkes og utvikles et kamerasystem med tilhørende objekt belysning til dronen. Kamerasystemets primæroppgave vil være å avbilde landingssted både før og -etter, for bedre å kunne dokumentere eventuell negativ påvirkning denne har på havbunn, på koraller og/eller andre viktige økosystemer.
Oppgaven går ut på å utvikle et egnet undervanns hus, eller integrert-/trykkutsatt optisk del-sammenstilling av eksisterende trykksylinder. Undersøke et mulighetsrom for ulike løsninger. Konstruksjonen må holde elektronikk tørt og sikkert opp til 3000m dybde. Løsningen bør være kostnadseffektiv og egnet for integrasjon av nodens utforming


Bilder:
-
Komponenter til testing og prototype.
-
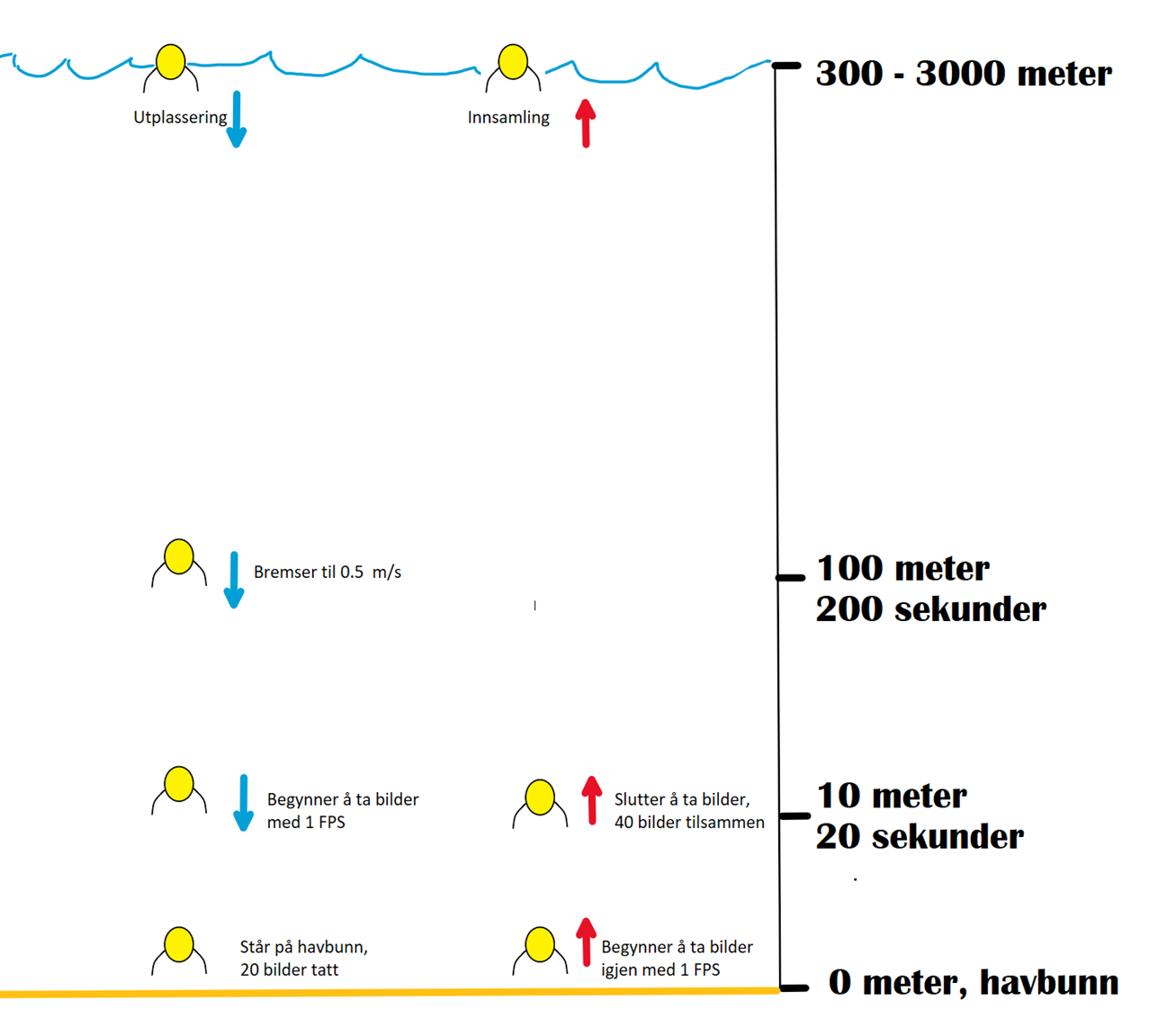
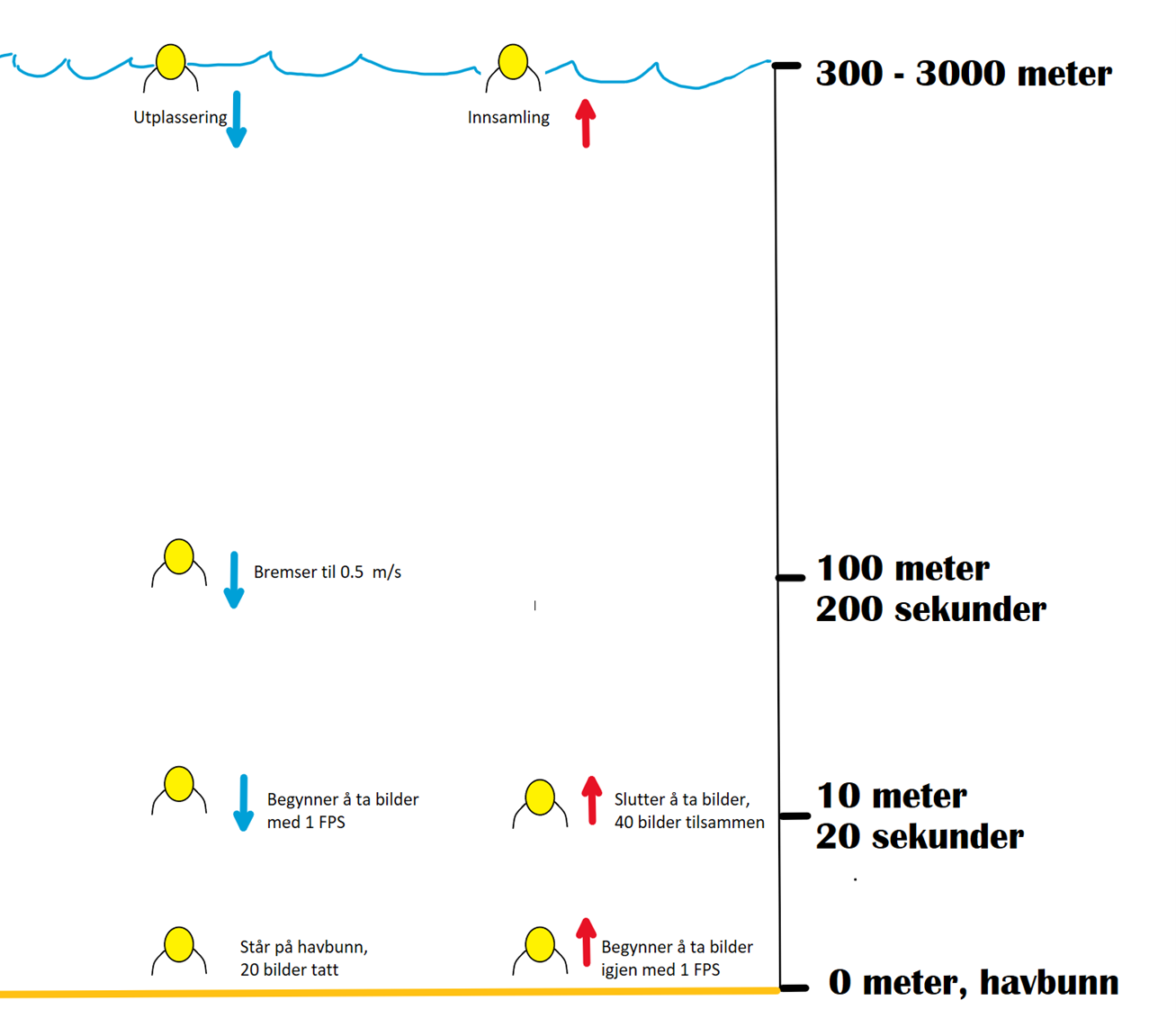
Kamerasystemets rolle i nodens operasjoner.
Prosjektdeltakere
Sidre Ådnanes Rekve og Tommy Daved.
Om oppdragsgiveren
iDROP A/S tilbyr en metode for havbunnssensorinstallasjon ved hjelp av sin selvnavigerende drone, Oceanid™. Dette systemet, som opererer autonomt ved hjelp av tyngdekraft og ballastskifte, transporterer sensorer nøyaktig til forhåndsbestemte havbunnsposisjoner.
Komplementert med et automatisk håndteringssystem for ubemannet utplassering og gjenvinning av sensorer, er hele iDROP-systemet effektivt, skalerbart og konteinerisert i tråd med ISO fraktstandarder.
Prosjektet, støttet av EU, Eureka, Norges Forskningsråd og store europeiske energiselskaper, markerer et viktig skritt fremover i marin teknologi.
Veileder
Litian Wang, Høyskolen i Østfold.
Thomas Quiel, iDrop AS.